卡尔曼滤波UKF实现三维目标跟踪 代码肯定能运行且有结果,可开发性强, 如果有问题可联系WX:ZB823618313 算法:标准的无迹卡尔曼滤波 仿真场景:三维目标,CV模型 传感器类型:主动雷达 MATLAB仿真仿真实现; 仿真...
”卡尔曼滤波算法 KF 三维目标“ 的搜索结果
卡尔曼滤波UKF实现三维目标跟踪 代码肯定能运行且有结果,可开发性强, 如果有问题可联系WX:ZB823618313 算法:标准的无迹卡尔曼滤波 仿真场景:三维目标,CV模型 传感器类型:主动雷达 MATLAB仿真仿真实现; 仿真...
在本章中,我们将在一个维度上推导出卡尔曼滤波。本章的主要目标是简单直观地解释卡尔曼滤波的概念,而不使用可能看起来复杂和令人困惑的数学工具。
卡尔曼函数与调试main函数。

对卡尔曼滤波和扩展卡尔曼滤波的仿真进行了简单介绍,不包含推导过程

卡尔曼滤波算法是比较经典的用于轨迹跟踪、轨迹平滑、状态估计的算法。模拟匀加速直线运动的物体跟踪实例,附python代码。


首先就从卡尔曼滤波(KF)这个比较成熟且应用广泛的技术开始吧。本文从一维简单地例子入手,到多维情况的推导以及卡尔曼滤波如何应用到线性系统中实现状态的最优估计进行简单推导并解释。 为什么 关于卡尔曼滤波的...
三维的组合导航。 ins和卫星的组合导航算法,基于卡尔曼滤波和eskf滤波的都有。 MATLAB源码,有kf和eskf的对比,也有单独的误差,或者输入滤波之后的位移速度等导航参数。

卡尔曼滤波的本质是参数化的贝叶斯模型,通过对下一时刻系统的初步状态估计(即状态的先验估计)以及测量得出的反馈相结合,最终得到改时刻较为准确的的状态估计(即状态的后验估计),其核心思想即为预测+测量反馈...
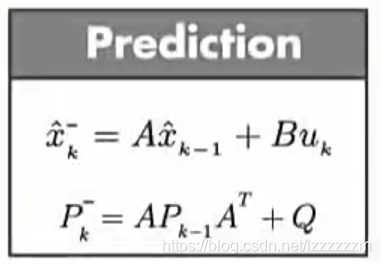
xkx_{k}xk 是状态分量的 nnn维矢量 AAA 是 n∗nn * nn∗n 的状态转移矩阵,也就是对目标状态转换的猜想模型,是已知的 uk−1u_{k-1}uk−1 是新的,让系统可以接受外部控制 BBB 是 n∗cn * cn∗c 矩阵,将输入...
EKF)是标准卡尔曼滤波在非线性情形下的一种扩展形式,EKF算法是将非线性函数进行泰勒展开,省略高阶项,保留展开项的一阶项,以此来实现非线性函数线性化,最后通过卡尔曼滤波算法近似计算系统的状态估计值和方差...

前言: 从上个世纪卡尔曼滤波理论被提出,卡尔曼滤波在控制论与信息论的...为了得出准确的下一时刻状态真值,我们常常使用卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、粒子滤波等等方法,这些方法在姿态解算、轨迹规
为了得出准确的下一时刻状态真值,我们常常使用卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、粒子滤波等等方法,这些方法在姿态解算、轨迹规划等方面有着很多用途。卡尔曼滤波的本质是参数化的贝叶斯模型,通过对下...
卡尔曼滤波算法实际上是一种Optical Recursive Data Processing Algorithm(最优化递归数据处理算法) 一、Data Fusion 在了解卡尔曼滤波算法之前首先了解一种数据融合思想。 假设现在有两个样本值Z1和Z2,则设估计值 ...
本文主要针对卡尔曼滤波器原理,推导公式进行了详细的学习总结。


最近需要做一个空中飞鼠(AirMouse)项目,其中对六轴陀螺仪回传的数据处理算法中需要用到一套滤波算法。来滤除无用的噪声和角度误差。 经过处理效果和可实现性比对,...卡尔曼滤波算法是卡尔曼(Kalman)等人在20世纪
【代码】C++实现卡尔曼滤波。

非线性卡尔曼滤波器 ——EKF与UKF 点击添加文本 点击添加文本 点击添加文本 点击添加文本 目录 扩展 卡尔曼滤波 Matlab仿真 前言 无损 卡尔曼滤波 点击添加... 适用于线性、离散和有限维系统。 一、前言 点击添加文...
推荐文章
- 踏板车的节油措施汇总-程序员宅基地
- gitlab仓库完整迁移(代码,分支,提交记录)_gitlab new directory-程序员宅基地
- 完美解决丨 - [SyntaxError: invalid syntax](#SyntaxError-invalid-syntax)_invalid create index syntax, use `create index for-程序员宅基地
- [网络安全自学篇] 三十五.恶意代码攻击检测及恶意样本分析_如何在数据包中分析那些是带有恶意攻击的和正常语句-程序员宅基地
- 如何带好一个团队?团队管理的要点有哪些?_如何管理好一个团队-程序员宅基地
- 暗影精灵9休眠时间间歇性风扇转动解决方法_暗影精灵9睡眠风扇突然转-程序员宅基地
- 常用Web漏洞扫描工具汇总(持续更新中)_网站扫描工具-程序员宅基地
- python图形化界面pyqt_python pyqt5 图形化界面编程-程序员宅基地
- html 如何给图片打标签,图文详解HTML页面中添加图片的三种方法-程序员宅基地
- oracle内核+相克军Oracle视频 看懂绝对是高级DBA了-程序员宅基地